← Back to Projects
Architected and structured the primary codebase for both the VAIO robot and the Glove controller using PlatformIO, employing C++ classes and static methods to enhance modularity, readability, and maintainability for team collaboration.
Implemented and refined the core gyroscope-based control system, enabling intuitive robot movement via the wearable glove, including developing the data transmission logic between the Glove and VAIO using the ESP-NOW protocol.
Spearheaded the integration and debugging efforts for the PS4 (DS4) controller functionality, troubleshooting library dependencies and Bluetooth communication issues to ensure reliable pairing and command input.
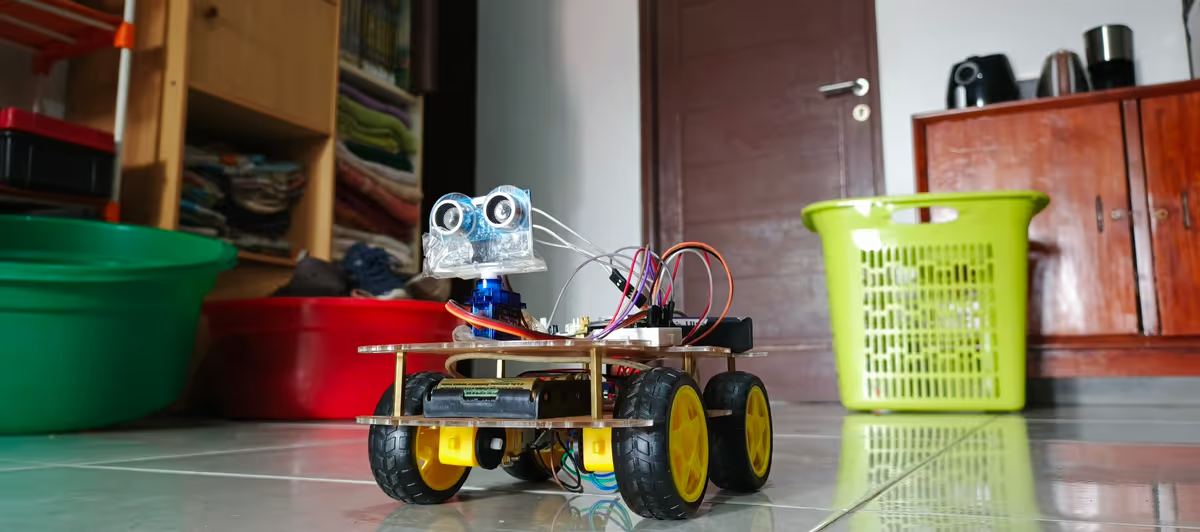
Actively participated in the physical hardware assembly, including wiring components, soldering connections for motors, sensors (ultrasonic), LED indicators, the vacuum system, and constructing the ESP32-based protoboard for the Glove controller.
Leveraged FreeRTOS to implement multi-core processing and concurrent task management on the VAIO robot, enabling simultaneous operation of sensor readings, motor control, communication handling (ESP-NOW, Web Server), and seamless switching between different control modes (Gyro, Auto, DS4).
Developed and debugged key peripheral functionalities, including implementing precise motor speed control using PWM, establishing the system for LED status indication corresponding to control modes, and enabling the glove-based button activation for the vacuum system and voice command input.
Contributed to the implementation and refinement of the master_control logic on the VAIO, ensuring smooth transitions between control states based on inputs received from the glove (gyro, speech, buttons) or the web interface.
C++